Request access
A small sample of 10 objects can be downloaded from the Database page. To acquire access to the whole dataset:
- Please print the End User License Agreement (EULA, download here).
- Sign it, and scan it.
- Send a mail to jacquard@liris.cnrs.fr and include the signed EULA as a pdf.
After your request is verified and approved by a website administrator, you will receive a notification by email. Please note, that any requests from free email addresses (hotmail, yahoo, gmail, etc.) will be refused.
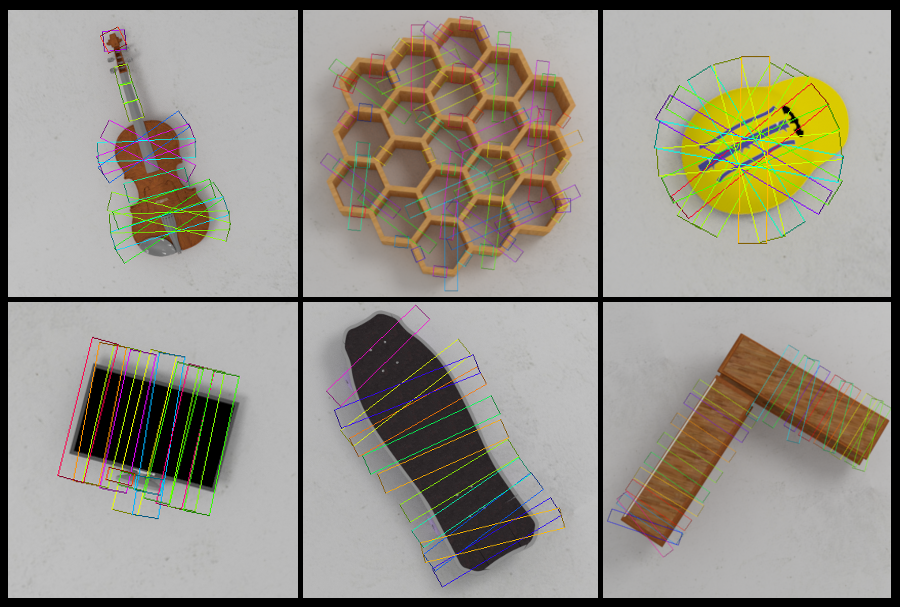
With the Jacquard dataset, we propose a new criterion based on simulation, subsequently called simulated grasp trial-based criterion (SGT). Specifically, when a new grasp should be evaluated, the corresponding scene is rebuilt in the simulation environment and the grasp is performed by the simulated robot, in the same conditions as during the generation of the annotations. If the outcome of the simulated grasp is a success, i.e., the object is successfully lifted and moved away by the simulated robot using the predicted grasp location, the prediction is then considered as a good grasp.
Along with the access to the whole dataset, registered users can use an interface to submit their predictions to our simulator and get the result of the Simulated Grasp Trial-based criterion introduced in the paper.
Citation
If you use Jacquard Dataset in your research, please cite the following paper:
- A. Depierre, E. Dellandrea, and L. Chen, “Jacquard: A Large Scale Dataset for Robotic Grasp Detection” in IEEE International Conference on Intelligent Robots and Systems, 2018.
![[PDF]]( images/pdf_icon.png "Download Jacquard_dataset.pdf")
Credits
The Jacquard Dataset has been created by a french team of researchers:
- Amaury Depierre, Siléane & Ecole Centrale de Lyon, LIRIS, France
- Emmanuel Dellandréa, Ecole Centrale de Lyon, LIRIS, France
- Liming Chen, Ecole Centrale de Lyon, LIRIS, France
We want to thank Matthieu Grard and Romain Brégier for their help. Of course, we also would like to thank the creators of Shapenet who shared their work.